
颜色作为一个心理物理量,在测量的过程中,会受到光源环境、观察者角度及物体表面状态等的影响。因此,为了定量的描述颜色,CIE提出了CIE1931标准色度学系统和CIE1964补充标准色度系统,作为颜色测量的理论基础。本文对颜色测量的理论基础及颜色测量的基本方法进行了介绍。

颜色作为一个心理物理量,不仅与物体表面反射、透射或吸收,照明光源的相对光谱功率分布相关,也依赖于人眼对光的响应特性。为了精确定量的描述颜色,CIE提出了CIE1931标准色度学系统和CIE1964补充标准色度系统,作为颜色测量的理论基础。
1.CIE1931XYZ色度系统
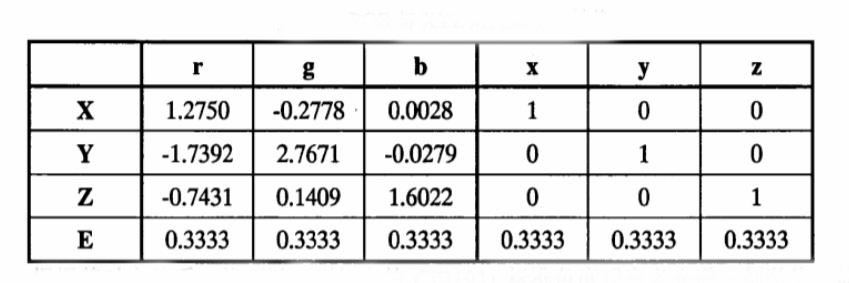
由于CIE1931RGB系统的三刺激值,r(λ),g(λ),b(λ)会出现负值,给色度学计算带来不便,在此基础上,CIE改用数学方法,选用三个理想的原色X、Y、Z代替R、G、B,将CIE1931RGB系统的三刺激值r(λ),g(λ),b(λ)均变为正值记为x(λ),y(λ),z(λ),并定名为“CIE1931标准色度观察者光谱三刺激值”,又称为“CIE1931标准色度观察者”,即CIE1931XYZ系统。CIE1931标准色度观察者光谱三刺激值是无法通过颜色匹配实验直接得到的,而是通过RGB系统的光谱色品坐标值经过换算求得,X、Y、Z和等能白光E点在两空间的转换关系如下表所示。
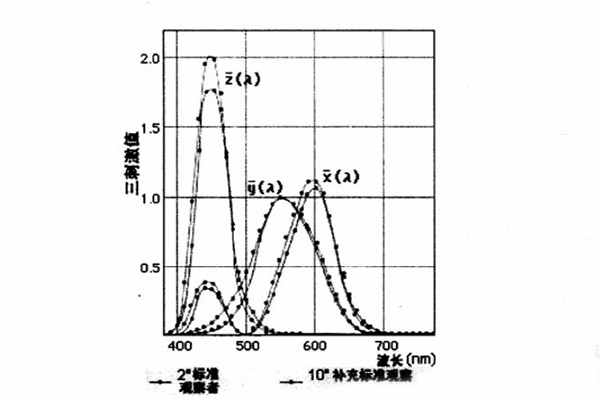
根据其对应关系,就可以得到相应的CIE1931标准色度观察者光谱三刺激值,体现在曲线图上则如下图所示。

由RGB和转换关系求得的CIE1931XYZ系统的色品坐标x,y,其相应的轨迹如下图所示。图中E表示等能白光。

2.CIE1964补充标准色度系统
实验发现,CIE1931标准色度系统规定的小视场角观察条件下的观察者数据在观察视场角增大到4。~10°时,其三刺激值在380nm~460nm的波段区间的数值明显比大视场观察条件下的三刺激值要小。所以,为了弥补小视场条件的不足,1964年CIE又推荐了一组“CIE1964补充标准色度观察者光谱三刺激值”和相应的色品图,称为“CIE1964补充标准色度系统”,其标准观察视场角为10°,为了与1931年规定的XYZ标准色度系统区分,将10°视场下的光谱三刺激值记为X10、Y10、Z10。与CIE1931标准色度系统相比,二者的光谱三刺激值曲线差异如下图所示,y10(λ)在400nm~500nm高于y(λ),这说明人眼用于小视场观察颜色时识别颜色差异的能力较差。
二者的色品图差异如下图所示,虽然光谱轨迹形状很相似,但是相同波长的光谱色在各自光谱轨迹上的位置差异就很大。

根据三刺激值计算原理可知,颜色测量有两种基本方法:
方法一:测量进入人眼的色刺激函数φ(λ),得到被测物体在各个波长下的光谱能量值,依照CIE三刺激值公式进行积分运算,以求得光谱三刺激值,这种方法称为分光光度法。分光光度法是精度最高的测色方法。
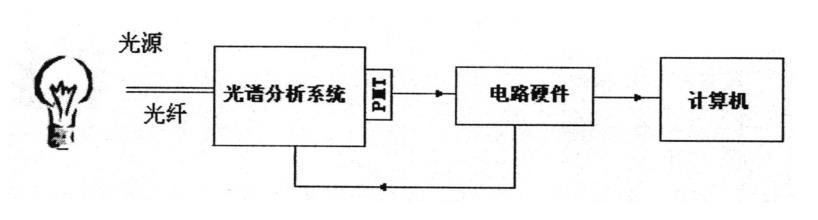
上图是采用分光光度法的光源光谱测试系统示意图,光源所发出的光由光纤进入光谱分析系统,光谱分析系统一般为单色仪,其波长扫描由硬件电路控制,由单色仪输出的单色光被光电倍增管PMT接收,并经过信号放大滤波后被采样,采样信号由计算机根据CIE三刺激值计算式进行分析计算,获得入射光的相对光谱功率分布。

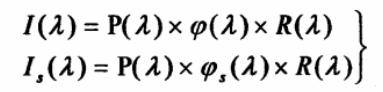
对于物体色的测量如上图所示,单色仪将光源转换为各种单波长光分别入射到被测对象和标准板上,光电探测器分别测量对被测对象和标准板在该波长上反射光的功率。假设从单色仪出来的光功率为P(λ),被测对象和标准板的反射率分别为φ(λ)和φs(λ),设光电探测器光谱响应为R(λ),光电探测器测得值分别为I(λ)和Is(λ)。
两式相除可得:

由此便可求得被测对象反射光光谱分布,如下式所示:

根据上面的三刺激值和色品坐标计算公式,可以计算出三刺激值和色度空间坐标值。
方法二:将探测器匹配成x(λ)、y(λ)、z(λ),也就是使探测器的光谱响应分别与x(λ)、y(λ)、z(λ)相一致,则这样的测试仪器就可以直接测量获得色品坐标等颜色参数,称为积分法。被测入射光被测通过三组滤光片组F照射在光电探测器D上,三组滤光片用于校正光电探测器光谱响应使之与色度函数相匹配,设滤光片组对某一波长为入的光的透射率分别为τx(λ)、τy(λ)和τz(λ),光电探测器对某一波长光的响应为R(λ),通过调整滤光片组透射率,使τ(λ)·R(λ)分别与标准色度函数相匹配,若入射光的光谱分布函数为φ(λ),则光电探测器输出的测量值为对φ(λ)·τ(λ)· R(λ)按波长积分,如果τ(λ)· R(λ)与标准色度函数相匹配,便可得到被测对象的三刺激值,设光电探测器输出的测量值分别为Xn、Yn和Zn光电积分法测量原理可用下式表达。
一般情况下,由三组滤光片组和三个探测器所组合的色度传感器需要光学系统对入射光能量进行分配,因此也有采用单探测器和三组滤光片组的色度传感器结构,其中红、绿、蓝滤色片组装在旋转马达的色盘上,马达旋转时,光探测器可输出被测目标光束的红、绿、蓝组成,通过后继电路和软件计算,可获得目标的亮度与色度参数。在该系统中滤色片组盘连续旋转,光探测器则可以不断输出被测目标的红、绿、蓝信号。
积分法的优点在于测量速度快,仪器性价比高,但是相对于分光光度法而言精度不高。
 扫一扫添加微信
扫一扫添加微信